설치한 버전은 아래와 같음!
version
- Ubuntu22.04.5
- ROS2 Humble
Quickstart
humble 버전
sudo apt-get install ros-humble-usb-cam
Building from Source
우선 usb_cam_ws 폴더를 만들어줌 →그 안에 src 폴더 만들어줌
mkdir -p usb_cam_ws/src
src폴더 안에!
git clone https://github.com/ros-drivers/usb_cam.git
다시 usb_cam_ws으로 나옴
..cd
의존성 확인!
rosdep install --from-paths src --ignore-src -y
build 하고
colcon build
source install/setup.bash
Running
ros2 run usb_cam usb_cam_node_exe
다른 터미널 하나 더 열어서 rqt로 확인 가능

자동으로 뜨는 카메라 설정하고 싶을 때는
usb_cam_node.cpp 들어가서

this->declare_parameter("video_device", "/dev/video2"); 뒤에 포트번호만 바꾸고

다시 usb_cam_ws/ 경로에서 colcon build 하고 source install/setup.bash
뒤에 포트 번호를 모를 때는

ros2 launch usb_cam camera.launch.py
ros2 humble, ubuntu22.04 환경에서 오류 발생
error_code
[ERROR] [launch]: Caught exception in launch (see debug for traceback): Caught multiple exceptions when trying to load file of format [py]: - PydanticUserError: If you use @root_validator with pre=False (the default) you MUST specify skip_on_failure=True. Note that @root_validator is deprecated and should be replaced with @model_validator.
https://qlalf-smithy.tistory.com/38
ROS2_USB_Cam_Error(@root_validator)
https://qlalf-smithy.tistory.com/34 ROS2_usb_cam 설치https://github.com/ros-drivers/usb_cam GitHub - ros-drivers/usb_cam: A ROS Driver for V4L2 USB CamerasA ROS Driver for V4L2 USB Cameras. Contribute to ros-drivers/usb_cam development by creating an a
qlalf-smithy.tistory.com
Launching Multiple usb_cam's
카메라를 여러 개 켜려면
/usb_cam/config/params_1.yaml과 /usb_cam/config/params_2.yaml 들어가서 본인이 키고 싶은 카메라에 맞는 포트번호 수정 (/dev/video1)
ros2 run usb_cam usb_cam_node_exe --ros-args --remap __ns:=/usb_cam_1 --params-file /본인경로/colcon_ws/src/usb_cam/config/params_1.yaml
ros2 run usb_cam usb_cam_node_exe --ros-args --remap __ns:=/usb_cam_2 --params-file /본인경로/colcon_ws/src/usb_cam/config/params_2.yaml
카메라 화질 올리기
내가 사용하는 usb 카메라 정보 확인하기
v4l2-ctl -d /dev/video2 --list-formats-ext
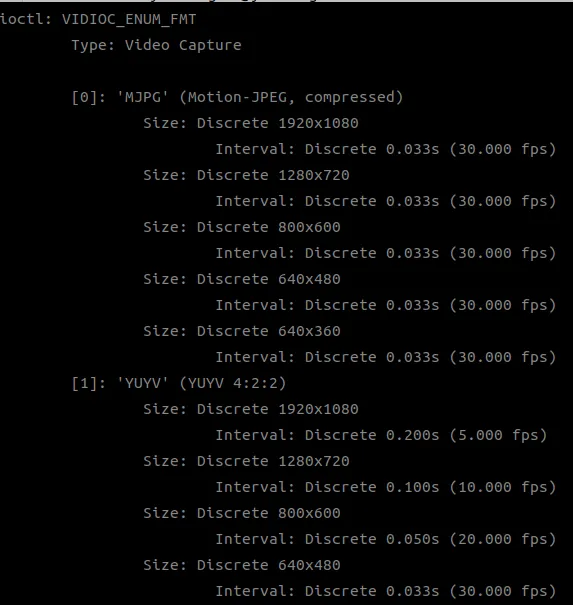
usb 카메라는 ‘MJPG’, ‘YUYV’ 2가지 포맷방식을 지원하고 각 포맷별로 여러 가지 출력 사이즈를 지원하고 있음.
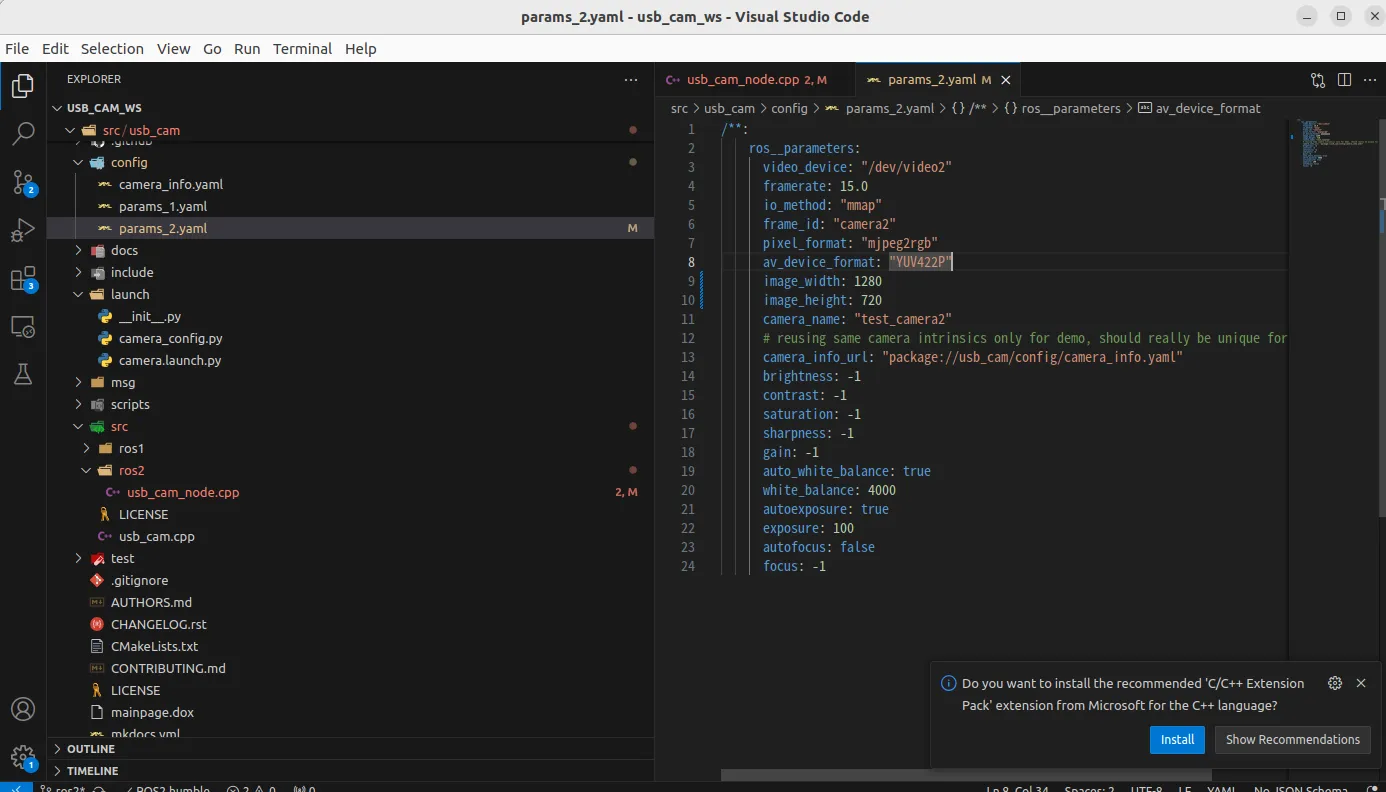
yaml 파일에서 카메라 해상도를 480 → 720으로 올림.
다시 usb_cam_ws/ 경로에서 source install/setup.bash
ros2 run usb_cam usb_cam_node_exe --ros-args --params-file ~/usb_cam_ws/src/usb_cam/config/params_2.yaml
rqt로 확인해 보면

480p 🔼
720p 🔼
더 좋아진 화질은 눈으로 확인이 가능했음!
rqt_gragh
/usb_cam은 /image_raw topic을 pub 함.
/image_raw를 sub 해서 사용하면 됨.

'ROS2' 카테고리의 다른 글
| [ROS2] 아이폰 LiDAR Scanner를 활용해 gazebo Map 만들기 (0) | 2025.06.29 |
|---|---|
| [ROS2] ROS2 Action 알아보기, 근데 이제 turtlesim을 곁들인 (2) | 2024.10.22 |
| [ROS2] ROS2 Service 알아보기, 근데 이제 turtlesim을 곁들인 (1) | 2024.10.18 |
| [ROS2] ROS2 Topic 알아보기, 근데 이제 turtlesim을 곁들인 (1) | 2024.10.16 |
| [ROS2] ROS2 설치하기 (3) | 2024.10.07 |



